CHARACTER RIGGING
The stage after Texturing: Rigging the characters. The biggest challenge when rigging the characters; I had to integrate a human mocap data into non-organic characters. This seemed impossible, as the joints of the robots consisted of 2 or 3 parts. Of course, everything seems a little impossible at first. One night after I started rigging, I had an idea. I created my own rig setup. Instead of linking the mocap data directly to the joints of the character, I decided to link it to the Curve controllers that control those joints. So I had a more controllable rig setup to be able to edit post mocap animations.
-CAT-
The part where I had trouble rigging the CAT was this. Its joints consisted of 2 parts and moved on 2 axes. Since I would get most of the animations from mocap data, I could not reach the exact desired result. I found the solution for this by adding drives to Curve controllers.

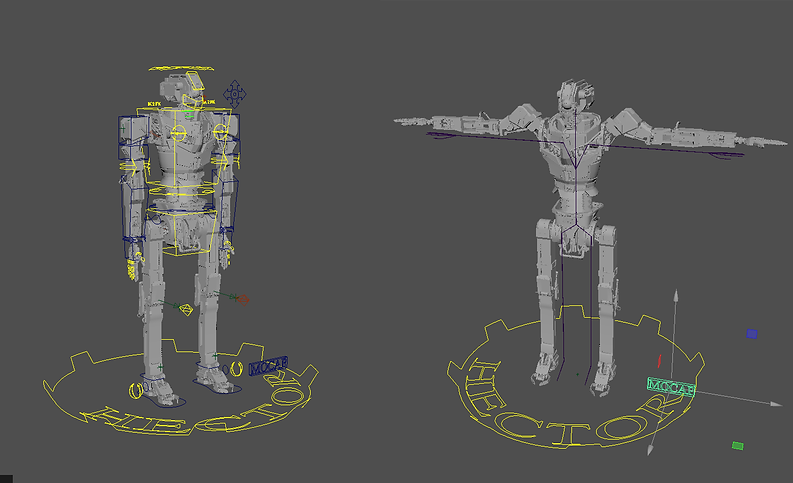
-HECTOR-
The rigg process took longer than I thought, as Hector has a very fragmented and functional structure. I did very complex driver installations, I was very careful not to prevent the body movements of the extra parts. Also while all this was happening, I needed a mocap data that I expected to move the whole character at the end of the job. I tried hard to get the Mocap data to run smoothly. I believe I succeeded in the end. But I do not know exactly what problems may arise during the animation phase.